Institute of System and Robotics
|
Institute of System and Robotics |
|
|
The aim of this work is to examine and develop a depth map acquisition
system with real-time characteristics and based on a binocular active vision
system . In order to obtain depth information we present a method that
combines stereo matching with mechanical activity, reducing the time
spent to perform the correspondence between the image points on the left
and right images.
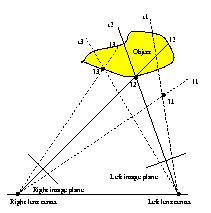
Controlling the cameras' vergence or the baseline distance it is possible
to change continuously the fixation point in the space and, at the
same time, to select points with correspondent image projections.
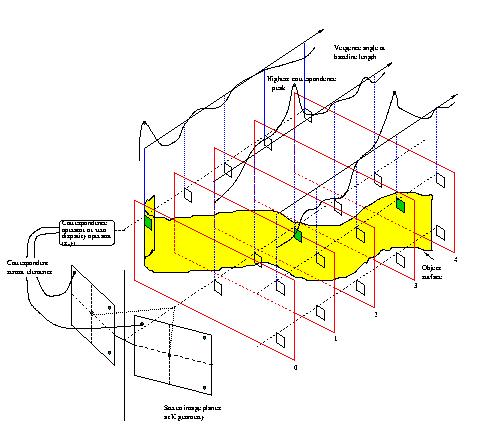
Computing the distance from those points to the vision system, is
possible to obtain a dense relative map of the scene. The correspondence
is established based on similarity measures between image regions. This
measures are performed by operators with characteristics that makes
this method suitable for parallel implementation. Since the depth information
is relative, the calibration of the active vision system is minimal.
 |
 |
Luis Almeida, Jorge Dias, "Dense Depth Maps using Stereo Vision Head", Proceedings of SIRS99 the 7th International Symposium on Intelligent Robotic Systems, Coimbra, July 20-23, 1999.
L. Almeida, J. Dias, A. Traça de Almeida, "Dense Depth Maps Using Active Vision", 9th Portuguese Conference on Pattern Recognition, Coimbra, Portugal, 20-21st March, 1997.
| Local time is
| and you are user |

