
Dataset
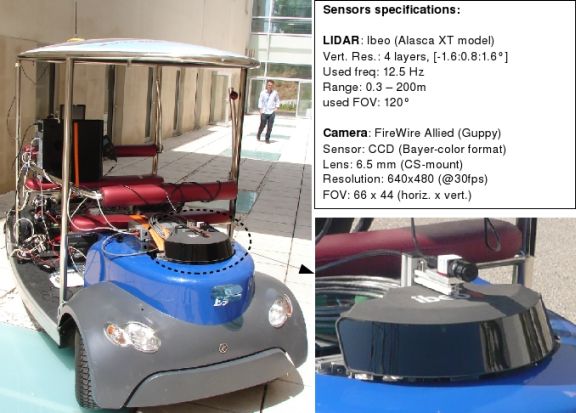
The LIPD Dataset was collected in the Coimbra Univeristy/ISR Campus zone (a satellite image is shown below). We have used our Yamaha-ISR electric vehicle (ISRobotCar), equiped with a multilayer automotive laserscanner Alasca-XT from Ibeo, a TopCon HyperPro GPS device in RTK mode, one IMU Mti from Xsens and a monocular Guppy camera.
Dataset reference citation (bibtex format):
@misc{lipd,
author = "Premebida, C. and Nunes, U.",
title =
"Laser and Image Pedestrian Detection Dataset - LIPD",
howpublished =
"http://www2.isr.uc.pt/~cpremebida/dataset/",}
The following files contain the training set:
Description |
N#files |
Zip files for download |
| Negative frames | 2444 |
ISRtrain_negframes.zip |
| Positives | 4606 |
ISRtrain_pos.zip |
| Negative ROIs | 34779 |
ISRtrain_negROIs.zip |
The following files contain the testing set:
Description |
N#files |
Zip files for download |
| Full frames | 4823 |
ISRtest_frames.zip |
| LIDAR scans | 4823 |
ISRtest_LIDARlog.zip |
| Annotations | 4823 |
ISRtest_gt.zip |
| GPS logs | 4823 |
ISRtest_GPSlog.zip |
| IMU logs | 4823 |
ISRtest_IMUlog.zip |
Some useful Matlab (.m files) scripts:
(i) Open and display testing-images and labeled bounding-boxes (ground-truth): Display_images_and_groundtruth.m
(ii) Open and display testing-images and projection of LIDAR scans (calibration parameters inside): Display_images_and_LIDAR.m
|
Satellite image of the urban environment (using Google Earth):  |